前言
MIT 18.06 Linear Algebra 公开课,由Gilbert Strang教授主讲,b站视频地址,共35讲。
讲座内容
Lecture 1: The Geometry of Linear Equations
从线性方程组出发,逐步引出线性代数。
Lecture 2: Elimination with Matrices
介绍“消元法”求解线性方程组,引出逆矩阵。
Lecture 3: Multiplication and Inverse Matrices
矩阵乘法
- sum of (
- 块矩阵乘法
方阵的可逆性
- 可逆
- 可逆
- 高斯-若尔当(Gauss-Jordan)消元
- 消元矩阵E(elimination matrix)
- 将矩阵
Lecture 4: Factorization into A = LU
- 消元矩阵(elimination matrix)的乘积,以这种总的思路审视高斯消元
- 允许row exchanges,需要使用置换矩阵
Lecture 5: Transposes, Permuations, Spaces
- 置换矩阵
- 转置
- 向量空间,子空间
- 零向量非常重要
Lecture 6: Column Spae and Nullspace
子空间的交集仍是子空间。
- 列空间
- 零空间
Lecture 7: Solving Ax=0 Pivot Variables, Special Solutions
介绍求解
目标是零空间不会改变 ,在消元过程中,解是不会变的,所以零空间不会改变。
主元(pivot variables)的数量就是秩。
- 简化行阶梯形式(reduced row echelon form)
- 主元的上下都是0
- Matlab中的rref函数
- 零空间
Lecture 8: Solving Ax=b Row Reduced Form
求解
增广矩阵
探讨可解性(solvability)
- 如果
- 言下之意是
- 言下之意是
- 第一步,先求特解
- 先设所有自由变量为0,求出一个特解
- 第二步,求零空间nullspace
- 第三步,完整解为:
- 如果
- 1个解
- 0或1个解
- 无穷多解
- 要么无解,要么无穷多解
矩阵的秩决定了方程组解的数目。
Lecture 9: Independence, Basis, and Dimension
- 线性无关性(Linear Independence)
- 如果零空间
- 关注不为0的线性组合
- 生成一个空间(Spanning a space)
- 由一组向量生成空间,意味着这个空间由这组向量的线性组合构成
- 关注所有线性组合
- “基”和“维数”(Basis and dimension)
- 生成空间时,最关心这样的向量组:既能生成空间,本身又是线性无关的
- 引出了“基”的概念
- 向量的个数足够多但又不会太多
- 关注一组线性无关的向量,并张成空间
- 重要性质:对于给定空间,空间中任意基的基向量个数是相等的
- 基向量的个数被称为维数
- 对同一个空间来说,所有基的向量个数是一样的
- 生成空间时,最关心这样的向量组:既能生成空间,本身又是线性无关的
Lecture 10: The Four Fundamental Subspaces
介绍4个基本子空间,需要回答两个基本问题:
- “基”是什么
- “维数”是多少
列空间
基就是主列(pivot columns)
- 注意,简化行阶梯形式
- “行变换”不会对行空间有影响,行空间就是
- “行变换”不会对行空间有影响,行空间就是
- 注意,简化行阶梯形式
零空间
- 基就是
行空间
将
- “行变换”不会对行空间有影响,行空间就是
- “行变换”不会对行空间有影响,行空间就是
- 相当于
- 高斯-若尔当消元
- 通过
- 高斯-若尔当消元
Lecture 11 Matrix Spaces Rank 1 - Small World Graphs
介绍由矩阵构成的“向量空间”,(满足向量空间的8大定律的元素都可以构成向量空间)。
比如
- 对称阵
- 上三角矩阵
举一个来自微分方程的例子,
- 即
- 特解:
- 完整解:
回到矩阵上,矩阵的最为关键的数字就是秩(rank),比如:
- 秩为1 的矩阵就像“积木”,搭建任何矩阵
- 例1: 所有秩4矩阵不能构成子空间
- 例2: 将朋友关系建模为矩阵,“六度分离猜想”(number six degrees of seperation)
Lecture 12 Graphs,Networks,Incidence Matrices
主要介绍线性代数的应用:
- 表示图结构
- 关联矩阵(Incidence Matrices)
- 表示电路图,从节点出来用
- 四个基本子空间对应了物理应用中的定律
- 主列(线性无关)对应的子图是个树
- 维度公式
- #nodes - #edges + #loops = 1
- 表示电路图,从节点出来用
- 基尔霍夫电流定律(Kirchoff's Current Law, KCL)
Lecture 13 Quiz 1 Review
习题课。
Lecture 14 Orthogonal Vectors and Subspaces
向量的正交,子空间的正交,基的正交。
矩阵
正交向量,若
零向量与任意向量都正交。
子空间
- 两个正交的子空间的交集一定不会是非零向量
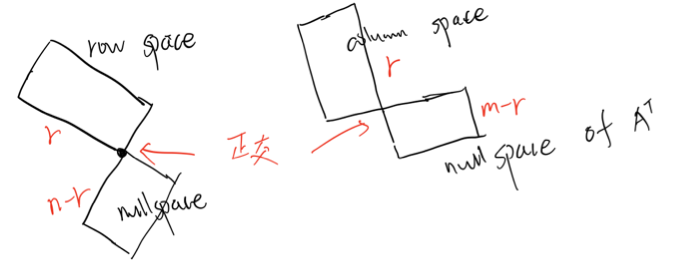
nullspace and row space are orthogonal complements (正交补) in
- 表示零空间包含所有垂直于行空间的向量
目前为止讨论了以及即将讨论以下内容:
- 一,线性代数的基本定理
- 四个基本子空间的关系
- 维数
- 二,正交性
- 三,基(正交基)
- 一,线性代数的基本定理
本章核心内容
- 无解意味着
- 当
- 因为
- 当且仅当
- 因为
- 无解意味着
Lecture 15 Projections onto Subspaces
这一章主要介绍投影(Projection)和最小二乘法(Least Squares)。
投影矩阵
- 把
- 记
- 投影矩阵的2个性质
- 对称:
- 如果投影2次,结果和1次一样:
- 对称:
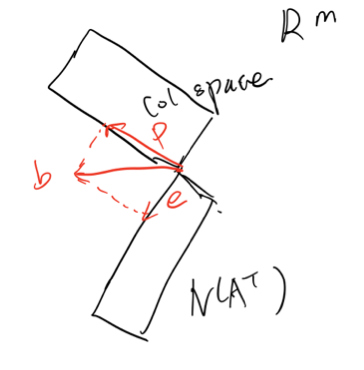
- 推广到高维情况
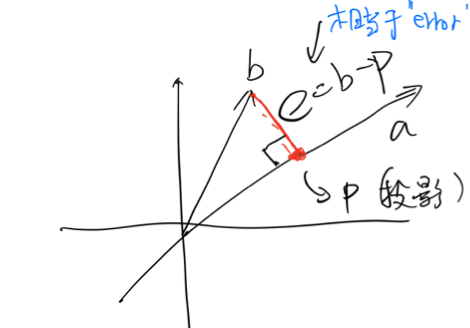
- 动机,为什么要投影?
- 微调
- 将原问题换作求解
- 一是在列空间中,那么投影就是它自己,投影后不改变原始解
- 二是不在列空间中,原始方程无解,误差向量
- 假设
- 关键在于
- 从上式可得,
- 从上面式子可得,非常重要的式子:
- 关于上面这个式子的三个问题:
- 投影是什么
- 投影矩阵是什么
- 满足两个性质:
- 对称
- 应用(最小二乘法)
- 动机,为什么要投影?
- 把
Lecture 16 Projection Matrices and Least Squares
投影、最小二乘法和最佳拟合曲线。
回顾投影矩阵
- 所以
- 所以
最小二乘法例子
- 用
- 从投影矩阵角度考虑
- 求解
- 从最小化均方误差
- Minimize
- 微分方程求偏导
- Minimize
- 二者最后得到的正规方程组相同
- 用
以上推导一直假设
- 根据
- 那么
- 利用假设,
互相垂直的各列一定线性无关
- 互相垂直的单位向量被称为标准正交向量组(orthonormal vectors)
Lecture 17 Orthogonal Matrices and Gram Schmidt
关于正交性的最后一讲,标准正交基,正交阵(orthogonal matrices),Gram-Schmidt方法。
- 当
- 比如置换矩阵(permutation matrix)
- 投影矩阵为
- 满足投影矩阵的2个性质
- 对称性
- 正规方程
- 投影矩阵为
- Gram-Schmidt 格拉姆-施密特正交化法
- 对于线性无关的向量
- 第一步,求出正交向量组
- 第二步,标准化
- 泛化到3个向量
- 第一步,求正交向量组
- 对于线性无关的向量
- 换个角度看Gram-Schmidt正交化方法
- 以前的消元法相当于
- Gram-Schmidt相当于
- 以前的消元法相当于
- 总结
Lecture 18 Properties of Determinants
方阵的行列式及其10条性质,由1,2,3条性质可推其它。
- 单位阵行列式为1,
- 交换行会使行列式正负号相反。
- 由1,2可得置换矩阵的行列式。
- 对于某一行,线性(Linear for each row)
- (a):
- (b):
- (a):
- 两行相等会使行列式为0。
- 用性质2可证,交换两行,符号交换但相等
- 从行
- 若有一行为0,则
- 上三角矩阵
- 当且仅当
- 求行列式方法,先求上三角,再求对角,(和消元法一样)
Lecture 19 Determinant Formulas and Cofactors
介绍求
利用行列式的基本性质1-3,可以将原行列式化为各行各列仅有一个元素的方阵的行列式之和。
Big Formula:
代数余子式(cofactors):
- 作用是把n阶行列式化简为n-1阶行列式。
- cofactor of
Lecture 20 Cramer's Rule, Inverse Matrix, and Volume
关于行列式的最后一课,行列式的应用。
- 逆矩阵
- 克莱姆法则 (Carmer's Rule)
- 克莱姆法则一般不用来解方程,计算太复杂,Matlab中用消元法解方程。
- 行列式的应用
- 行列式的绝对值等于一个箱子的体积,正负号表示左手系还是右手系。
- 如果三角形的顶点不在原点,三个顶点坐标为
- 具体推导过程,对上面的矩阵消元,想当于使三角形回到原点
Lecture 21 Eigenvalues and Eigenvectors
方阵特征值和特征向量。
- 特征向量
- 如果
- 先看投影矩阵
- 任何平面上的向量就是特征向量,
- 任何垂直于平面的向量,
- 任何平面上的向量就是特征向量,
- 性质
- 特征值的和是矩阵
- 特征值的和是矩阵
- 如何求解特征值
- 重写为
- 除了零向量,要有非零
- 称为“特征方程(characteristic equation)”or 特征值方程“eigenvalue equation”
- 除了零向量,要有非零
- 重写为
- if
- 特征值加3,特征向量不变
- 旋转矩阵会有复数解
- 反对称矩阵会出现复数解
Lecture 22 Diagonalizing a matrix and Powers of A
特征值的第二讲。
- 对角化一个矩阵:
- 可逆
- 可逆
- 假设
- 特征值和特征向量提供了理解矩阵幂的一种好方法
- 假设
- 假设
- 定理
- 如果所有
- 以上这些推导的前提条件是
- 如果所有
- 哪些矩阵可对角化呢?
- 如果
- 充分但不必要
- 如果
- 如果
- Powers of A
- 一阶差分方程
- 把
- 斐波那契数列例子
- 不禁要问
- 这个数列的“增长速度如何”?
- 增长速度由特征值决定
- 这个数列的“增长速度如何”?
- 写成一阶:
- 方程组为:
- 可得
- 系数矩阵是对称阵,可知
- 特征值是实数
- 特征向量一定正交
- 求系数矩阵的特征值和特征向量
- 特征向量:
- 然后把
- 特征值决定增长的趋势,发散至无穷还是收敛于0
- 写成一阶:
- 把
Lecture 23 Differential Equations and exp(At)
微分方程
- 微分方程
- 例子
- 系数矩阵
- 奇异的
- 解的形式是
- 首先根据
- 然后得到
- 可以看出稳态是
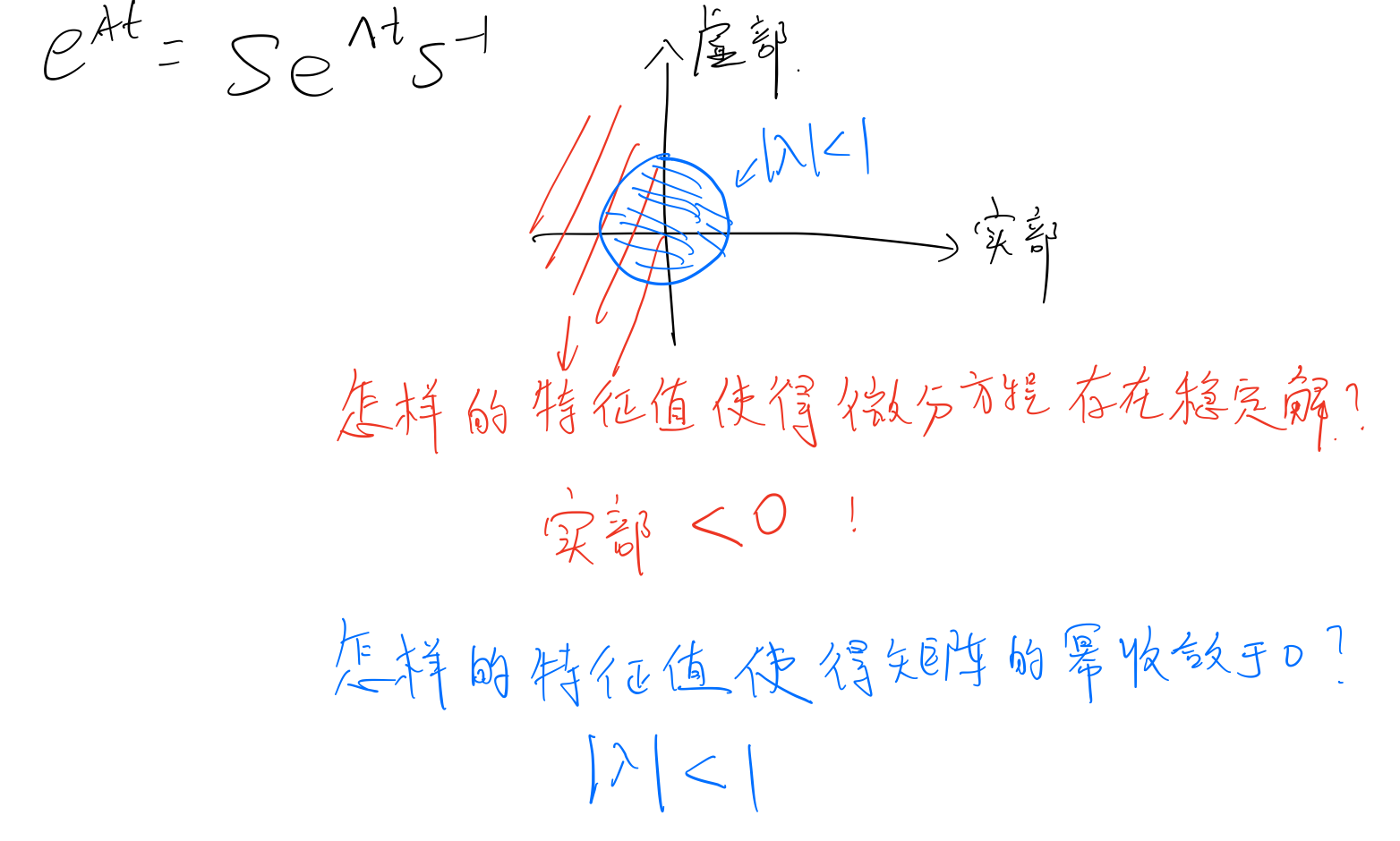
- 什么情况下才有稳态?
- 稳定性 stability,需要
- 稳定性 stability,需要
- steady state需要
- steady state需要
- 无法收钱,if 任一
- 无法收钱,if 任一
- trace
- trace
- 回到原来的方程组
- 矩阵
- 设
- 关键在于以特征向量为基,将
- 关键在于以特征向量为基,将
- 矩阵指数(Matrix exponentials)
- 类似于
- 类似于
- 要求
- 类似于
- 要求
- 证明
- 如果所有特征值的实部为负(
- 如果所有特征值的实部为负(
- 只有1个方程:
- 把1个二阶微分方程化为一阶方程组
- 令
- 同理五阶的微分方程也可以化为一阶方程组,对应矩阵为:
- 矩阵
- 例子
Lecture 24 Markov Matrices, Fourier Series
主要内容包括:马尔可夫矩阵和它的稳态,Fourier Series Projections,特征值的应用。
- Markov Matrices (马尔可夫矩阵)
- 满足以下条件:
- 所有元素
- 每一列加起来为1
- 它的幂也是马尔可夫矩阵
- 所有元素
- 稳态和特征值1及其特征向量关联在一起
- 稳态的关键在于
- 所有其它特征值
- 证明:每一列的和为1,那么1是特征值
- 思路:如果
- 由于
- 方法
- 求行列式
- 奇异的,意味着
- 列向量线性相关
- 行向量线性相关(正好有
- 求行列式
- 以3阶矩阵为例,说明
- then,
- then,
- 利用
- 思路:如果
- 应用,马尔科夫矩阵,
- 两个地方的人口迁移问题
- 傅立叶级数
- 回归带有标准正交基的投影问题
- 标准正交基:
- 基向量的系数很容易求出:
- 标准正交基:
- Fourier series可以把任何周期函数或周期信号分解成一个(可能由无穷个元素组成的)简单振荡函数的集合(PERIODIC Function,周期函数)
- 已知函数
- 无穷维,关键性质是正交
- “正交”
- 向量的正交是
- 函数的正交(对于函数
- 向量的正交是
- 怎么计算
- 回归带有标准正交基的投影问题
Lecture 25 Review for Quiz 2
习题课,包括以下内容:
- 投影,最小二乘,Gram-Schmidt正交化
- 行列式的性质,代数余子式
- 特征值,对角化,矩阵的幂
Lecture 26 Symmetric Matrices and Positive Definiteness
本讲是关于对称矩阵的知识,
- 根据矩阵的对角化:
- 对称矩阵
- 为什么对称阵的特征值是实数?
- 先回归共轭:
- 转置2. 可得
- 由于对称,
- 1.左乘
- 3.右乘
- 由上面两个式子可得,
- A为复矩阵时
- 转置2.可得,
- 1.左乘
- 4.右乘
- 所以,当且仅当
- 定义新的符号:
- 转置2.可得,
- 先回归共轭:
- 对称阵可以分解为
- 每个对称阵都是一些互相垂直的投影矩阵的组合,(理解谱定理的另一种方法)
- 上面知道了对称阵的特征值是实数了,下面分析一下特征值的正负
- 对于对称阵来说,主元的符号与特征值的符号相同
- 正主元的个数等于正特征值的个数
- 什么是正定矩阵(positive definite matrix)(对称的)
- 所有的特征值是正的
- 所有的主元是正的
- 所有的子行列式是正的(从左上角开始,
- 微分方程需要根据特征值的正负判断稳定性
- 对于对称阵来说,主元的符号与特征值的符号相同
- 对称矩阵