前言
MIT 18.06 Linear Algebra 公开课,由Gilbert Strang教授主讲,b站视频地址,共35讲。
讲座内容
Lecture 1: The Geometry of Linear Equations
从线性方程组出发,逐步引出线性代数。
Lecture 2: Elimination with Matrices
介绍“消元法”求解线性方程组,引出逆矩阵。
Lecture 3: Multiplication and Inverse Matrices
矩阵乘法\(A_{m\times n} B_{n\times p}=C_{m\times p}\)的5种表示:
- \(C_{ij}=\sum_{k=1}^n A_{ik}B_{kj}\)
- \(C\)的列向量是\(A\)的列向量的线性组合
- \(C\)的行向量是\(B\)行向量的线性组合
- sum of ( \(A\)的一列 \(\times\) \(B\)的一行 )
- 块矩阵乘法
方阵的可逆性
- 可逆 \(\Longleftrightarrow\) 非奇异(non-singular)
- 高斯-若尔当(Gauss-Jordan)消元
- 消元矩阵E(elimination matrix)
- 将矩阵\(A\)后边加上单位阵\(I\)一起做变换,将得到\(E [A\quad I] = [I\quad ?]\),根据块矩阵乘法,\(EA=I\)
- \((AB)^{-1}=B^{-1}A^{-1}\)
Lecture 4: Factorization into A = LU
- \(AB,A^T\)的逆
- 消元矩阵(elimination matrix)的乘积,以这种总的思路审视高斯消元
- \(A=LU\), \(L:\) 下三角矩阵,\(U:\)上三角矩阵(先考虑在消元时,不需要row exchanges的情况,即不需要调整主元的位置,没有0在主元位置)
- \(E_{32}E_{31}E_{21}A=U\)
- \(A = E_{21}^{-1}E_{31}^{-1}E_{32}^{-1}U\)
- \(LU\)包含了\(A\)的所有信息,求解的复杂度在\(O(n^3)\)
- 允许row exchanges,需要使用置换矩阵\(P\)(Permuations,将单位阵的行交换后得到)
- \(P^{-1}=P^T\)
- \(4\times 4\)的置换矩阵有24种
Lecture 5: Transposes, Permuations, Spaces \(\mathbb{R}^n\)
- 置换矩阵
- 转置
- 向量空间,子空间
- 零向量非常重要
Lecture 6: Column Spae and Nullspace
子空间的交集仍是子空间。
- 列空间
- \(A\)的列空间是\(A\)的所有列的线性组合,记作\(C(A)\)
- \(Ax=b\)有解,当且仅当\(b\)在\(A\)的列空间中
- 零空间
- \(Ax=0\)的所有解
Lecture 7: Solving Ax=0 Pivot Variables, Special Solutions
介绍求解\(Ax=0\)的具体算法。
目标是零空间不会改变 ,在消元过程中,解是不会变的,所以零空间不会改变。
主元(pivot variables)的数量就是秩。
- \(Ax=0\),在消元过程中,形成阶梯形式矩阵,判断主元(pivot variables)和自由变量(free variables),自由变量任意取值(001,100,010这样取值)确定特解(special solutions),特解的线性组合都是所有解
- 简化行阶梯形式(reduced row echelon form)
- 主元的上下都是0
- Matlab中的rref函数
- 零空间 \([-F;I]\)
Lecture 8: Solving Ax=b Row Reduced Form \(R\)
求解\(Ax=b\)。
增广矩阵\([A\quad b]\);
探讨可解性(solvability)
- 如果\(A\)各行的线性组合得到零行,那么\(b\)中的元素同样组合必然等于0
- 言下之意是\(b\)对可解性有约束
- 第一步,先求特解\(x_{particular}\)
- 先设所有自由变量为0,求出一个特解
- 第二步,求零空间nullspace
- 第三步,完整解为:
- \(x_{complete} = x_{particular} + x_{nullspace}\)
- 如果\(A\)各行的线性组合得到零行,那么\(b\)中的元素同样组合必然等于0
\(Ax=b\)解的情况与秩\(r\)有关,记简化行阶梯形式为\(R\),\(F\)代表其中的自由变量对应的列
- \(r=m=n\)
- \(R=I\)
- 1个解
- \(r=n<m\)
- \(R=[I;0]\)
- 0或1个解
- \(r=m<n\)
- \(R=[I\quad F]\)(这样的表述不够准确,\(I\)和\(F\)实际上可能交叉出现)
- 无穷多解
- \(r<m,r<n\)
- \(R=[I\quad F; 0\quad 0]\)
- 要么无解,要么无穷多解
- \(r=m=n\)
矩阵的秩决定了方程组解的数目。
Lecture 9: Independence, Basis, and Dimension
- 线性无关性(Linear Independence)
- \(c_1x_1 + \dots + c_nx_n\ne 0\) (\(c_i\)不全为0)
- 如果零空间\(N(A)\)存在非零向量,那么各列线性相关
- 关注不为0的线性组合
- 生成一个空间(Spanning a space)
- 由一组向量生成空间,意味着这个空间由这组向量的线性组合构成
- 关注所有线性组合
- “基”和“维数”(Basis and dimension)
- 生成空间时,最关心这样的向量组:既能生成空间,本身又是线性无关的
- 引出了“基”的概念
- 向量的个数足够多但又不会太多
- 关注一组线性无关的向量,并张成空间
- 重要性质:对于给定空间,空间中任意基的基向量个数是相等的
- 基向量的个数被称为维数
- 对同一个空间来说,所有基的向量个数是一样的
- 生成空间时,最关心这样的向量组:既能生成空间,本身又是线性无关的
Lecture 10: The Four Fundamental Subspaces
介绍4个基本子空间,需要回答两个基本问题:
- “基”是什么
- “维数”是多少
列空间\(C(A)\)
\(\mathbb{R}^m\)的子空间
\(dimC(A)=r\)
基就是主列(pivot columns)
- 注意,简化行阶梯形式\(R\), \(C(R)\ne
C(A)\)
- “行变换”不会对行空间有影响,行空间就是\(R\)的前\(r\)行
- 注意,简化行阶梯形式\(R\), \(C(R)\ne
C(A)\)
零空间\(N(A)\)
- \(\mathbb{R}^n\)的子空间
- \(dimN(A)=n-r\)
- 基就是\(Ax=0\)特解组成的矩阵(special solutions)
行空间\(C(A^T)\)
\(\mathbb{R}^n\)的子空间
\(dimC(A^T)=r\)
将\(A\)进行行变换得到\(R\)
- “行变换”不会对行空间有影响,行空间就是\(R\)的前\(r\)行
\(A^T\)的零空间\(N(A^T)\)(也被称为左零空间)
- \(\mathbb{R}^m\)的子空间
- \(dimN(A^T)=m-r\)
- 相当于\(A^Ty=0\Longrightarrow
y^TA=0\)
- 高斯-若尔当消元 \(E[A_{m\times x}\quad I_{m\times m}]\longrightarrow [R_{m\times n}\quad E_{m\times m}]\), 初等行变换
- 通过\(E\)来求基,\(R\)中的最后几行为0的话,正好是\(y^TA\),\(y\)中向量将\(A\)的行向量组合为0
Lecture 11 Matrix Spaces Rank 1 - Small World Graphs
介绍由矩阵构成的“向量空间”,(满足向量空间的8大定律的元素都可以构成向量空间)。
比如\(M\)空间是所有\(3\times 3\)的矩阵,它的子空间有:
- 对称阵\(_{3\times 3}\)
- 上三角矩阵\(_{3\times 3}\)
举一个来自微分方程的例子,\(\frac{d^2y}{dx^2}+y=0\)的所有解:
- 即\(y^{\prime\prime}+y=0\)
- 特解:\(y=\cos x,\sin x\) (特解还有其它的)
- 完整解:\(y=c_1\cos x + c_2 \sin x\)
- \(\cos x,\sin x\)就是一组基
回到矩阵上,矩阵的最为关键的数字就是秩(rank),比如:
- \[A = \begin{bmatrix} 1 & 4 & 5 \\ 2 & 8 & 10 \end{bmatrix}= \begin{bmatrix} 1 \\ 2 \end{bmatrix} \begin{bmatrix} 1 & 4 & 5 \end{bmatrix}= \vec{u}\vec{v}^T \]
- 秩为1 的矩阵就像“积木”,搭建任何矩阵
- 例1: 所有秩4矩阵不能构成子空间
- 例2: 将朋友关系建模为矩阵,“六度分离猜想”(number six degrees of seperation)
Lecture 12 Graphs,Networks,Incidence Matrices
主要介绍线性代数的应用:
- 表示图结构
- 关联矩阵(Incidence Matrices)
- 表示电路图,从节点出来用\(-1\)表示,进入节点用\(1\)表示,其它用0,节点\(x\)表示电势,\(Ax\)可以看作是节点间的电势差。
- 四个基本子空间对应了物理应用中的定律
- 主列(线性无关)对应的子图是个树
- 维度公式\(dim
N(A^T)=m-r\)可以推出欧拉公式:
- #nodes - #edges + #loops = 1
- 基尔霍夫电流定律(Kirchoff's Current Law, KCL)
Lecture 13 Quiz 1 Review
习题课。
Lecture 14 Orthogonal Vectors and Subspaces
向量的正交,子空间的正交,基的正交。
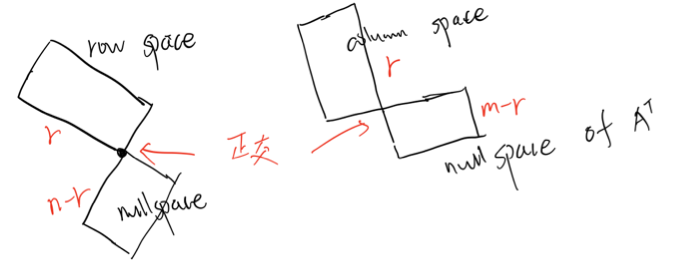
矩阵\(A\)的4个基本子空间:行空间(row space),零空间(nullspace),列空间(column space),\(A^T\)的零空间,关系如下:
正交向量,若\(\vec{x}\)和\(\vec{y}\)正交,则\(\vec{x}^T\vec{y}=0\)。
零向量与任意向量都正交。
子空间\(S\)与子空间\(T\)正交的意思是:
- \(S\)中的每个向量都和\(T\)中的每个向量正交
- 两个正交的子空间的交集一定不会是非零向量
nullspace and row space are orthogonal complements (正交补) in \(\mathbb{R}^n\)
- 表示零空间包含所有垂直于行空间的向量
目前为止讨论了以及即将讨论以下内容:
- 一,线性代数的基本定理
- 四个基本子空间的关系
- 维数
- 二,正交性
- 三,基(正交基)
- 一,线性代数的基本定理
本章核心内容
- \(Ax=b\)无解时怎么求?(下一章具体介绍)
- 无解意味着\(b\)不在\(A\)的列空间中
- 当\(A\)矩阵,\(m > n\)时,右侧取值大部分情况都无解,(消元后,A的最后几行是0,对b的约束更多)
- \(A^TA\)矩阵
- 因为\(Ax=0 \Longrightarrow A^TAx=0\),所以\(N(A^TA)=N(A)\)
- 当且仅当\(A\)的零空间只有零向量时,\(A^TA\)是可逆的
- \(N(A)=0 \Longrightarrow N(A^TA)=0 \Longrightarrow N(A^TA)=n-r=0 \Longrightarrow A^TA\)的秩为\(n\)
- \(Ax=b\)无解时怎么求?(下一章具体介绍)
Lecture 15 Projections onto Subspaces
这一章主要介绍投影(Projection)和最小二乘法(Least Squares)。
投影矩阵
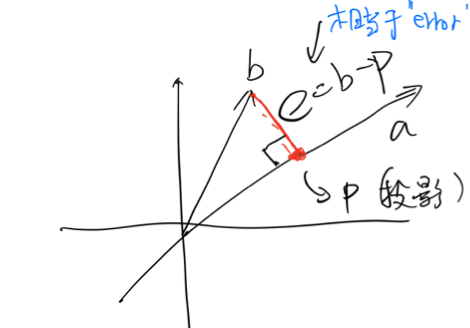
- 把\(b\)投影到\(a\)上,记\(a\)上离\(b\)最近的点为\(p\)
- \(p=xa\) (倍数)
- \(a^T(b-xa)=0\)
- \(x=\frac{a^Tb}{a^Ta}\)
- \(p=a\frac{a^Tb}{a^Ta}\)
- 记\(p=Pb\),那么\(P=\frac{aa^T}{a^Ta}\),\(P\)称为投影矩阵(projection matrix)
- \(aa^T\)秩为1
- 投影矩阵的2个性质
- 对称:\(P^T=P\)
- 如果投影2次,结果和1次一样:\(P^2=P\)
- 推广到高维情况
- 动机,为什么要投影?
- \(Ax=b\)也许无解,只能求解最接近的那个可解问题
- \(Ax\)总是在\(A\)的列空间中,\(b\)不一定在(比如方程有噪声)
- 微调\(b\),把\(b\)变成列空间中最接近它的那一个
- 将原问题换作求解\(A\hat{x}=p\)(有解的),\(p\)是\(b\)在列空间上的投影
- \(\hat{x}\)不是原来的解,但是是最接近解的
- \(Ax=b\)也许无解,只能求解最接近的那个可解问题
- \(b\)有两种情况
- 一是在列空间中,那么投影就是它自己,投影后不改变原始解
- 二是不在列空间中,原始方程无解,误差向量\(e=b-p\),\(e\)垂直于超平面
- 假设\(A=[a_1 \quad a_2]\)
- \(p=A\hat{x}\),找到\(\hat{x}\)
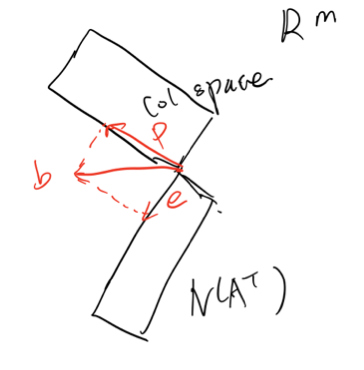
- 关键在于\(e=b-p=b-A\hat{x}\)垂直于平面,得:
- \(a_1^T(b-A\hat{x})=0,a_2^T(b-A\hat{x})=0 \Longrightarrow\)
- \(A^T(b-A\hat{x})=0\)
- 从上式可得,\(e\)在\(N(A^T)\)中,而\(N(A^T)\)与\(A\)的列空间\(C(A)\)是正交的,可得 \(e\perp C(A)\)
- 从上面式子可得,非常重要的式子: \[A^TA\hat{x}=A^Tb\]
- 关于上面这个式子的三个问题:
- \(\hat{x}\)是什么
- \(\hat{x}=(A^TA)^{-1}A^Tb\)
- 投影是什么
- \(p=A\hat{x}=A(A^TA)^{-1}A^Tb\)
- 投影矩阵是什么
- \(P=A(A^TA)^{-1}A^T\) (需要注意的是,括号不能随便打开,因为\(A\)不一定可逆)
- 满足两个性质:
- 对称
- \(P^2=P\)
- \(\hat{x}\)是什么
- 应用(最小二乘法)
- 动机,为什么要投影?
- 把\(b\)投影到\(a\)上,记\(a\)上离\(b\)最近的点为\(p\)
Lecture 16 Projection Matrices and Least Squares
投影、最小二乘法和最佳拟合曲线。
回顾投影矩阵
- \(P=A(A^TA)^{-1} A^T\)
- \(e=b-p=b-Pb=(I-P)b\)
- 所以\(I-P\)是把\(b\)投影到\(N(A^T)\)上的投影矩阵
最小二乘法例子
- 用\(y=C+Dt\)拟合3个点\((1,1),(2,2),(3,2)\)
- 从投影矩阵角度考虑
- \(A^TA\hat{x}=A^Tb\)
- 求解\(\hat{x}\)
- 从最小化均方误差
- Minimize \(||Ax-b||^2=||e||^2\)
- 微分方程求偏导
- 二者最后得到的正规方程组相同
以上推导一直假设\(A^TA\)是可逆的,下面证明当\(A\)各列线性无关时,\(A^TA\)一定可逆:
- \(A^TA\)要可逆的话,\(N(A^TA)\)一定只有零向量,即\(A^TAx=0\)只有零解,
- 根据\(A^TAx=0\),那么有\(x^TA^TAx=0\),那么有\((Ax)^T(Ax)=0\),(\(a^Ta\)是长度),
- 那么\(Ax\)一定是零向量,
- 利用假设,\(A\)各列线性无关,可推出\(x=0\)
互相垂直的各列一定线性无关
- 互相垂直的单位向量被称为标准正交向量组(orthonormal vectors)
Lecture 17 Orthogonal Matrices and Gram Schmidt
关于正交性的最后一讲,标准正交基,正交阵(orthogonal matrices),Gram-Schmidt方法。
- 当\(Q\)是方阵时,才称为正交矩阵
- \(q_i,q_j\)表示标准正交向量
- \(Q^TQ=I\),\(Q^T=Q^{-1}\)
- 比如置换矩阵(permutation matrix)
- \(Q\)是有标准正交向量的矩阵
- 投影矩阵为\(P=Q(Q^TQ)^{-1}Q^T=QQ^T\)
- 满足投影矩阵的2个性质
- 对称性
- \(Q^2=Q\)
- 正规方程\(A^TA\hat{x}=A^Tb\),对于正交矩阵来说,即\(Q^TQ\hat{x}=Q^Tb\)
- \(\hat{x}=Q^Tb\)
- \(\hat{x}_i=q_i^{T}b\)
- \(\hat{x}=Q^Tb\)
- Gram-Schmidt 格拉姆-施密特正交化法
- 对于线性无关的向量\(a,b\)
- 第一步,求出正交向量组\(A,B\)
- \(A=a\)
- \(B=b-p=b-\frac{A^Tb}{A^TA}A\) ( 减去\(b\)在\(a\)上的投影)
- 第二步,标准化\(q_1=\frac{A}{||A||},q_2=\frac{B}{||B||}\)
- 泛化到3个向量\(a,b,c\)
- 第一步,求正交向量组\(A,B,C\)
- \(A=a\)
- \(B=b-\frac{A^Tb}{A^TA}A\)
- \(C=c-\frac{A^Tc}{A^TA}A - \frac{B^Tc}{B^TB}B\)
- 换个角度看Gram-Schmidt正交化方法
- 以前的消元法相当于\(A=LU\)
- Gram-Schmidt相当于\(A=QR\)
- \(R\)是上三角矩阵,因为后面构造的\(q\)向量垂直于先前的向量
- 总结
- \(A\)的各列线性无关,Gram-Schmidt构造一组标准正交列的矩阵\(Q\)
- \(A\)和\(Q\)通过上三角矩阵\(R\)联系:\(A=QR\)
- \(A\)的各列线性无关,Gram-Schmidt构造一组标准正交列的矩阵\(Q\)
Lecture 18 Properties of Determinants
方阵的行列式及其10条性质,由1,2,3条性质可推其它。
- 单位阵行列式为1,\(\det I = 1\) 。
- 交换行会使行列式正负号相反。
- 由1,2可得置换矩阵的行列式。
- 对于某一行,线性(Linear for each row)
- (a): \[\begin{vmatrix} t\cdot a & t\cdot b \\ c & d \end{vmatrix}=t\begin{vmatrix} a & b \\ c & d \end{vmatrix}\]
- (b): \[\begin{vmatrix} a+a^{\prime} & b+b^{\prime} \\ c & d \end{vmatrix}=\begin{vmatrix} a & b \\ c & d \end{vmatrix} + \begin{vmatrix} a^{\prime} & b^{\prime} \\ c & d \end{vmatrix}\]
- 两行相等会使行列式为0。
- 用性质2可证,交换两行,符号交换但相等
- 从行\(k\)减去行\(i\)的\(l\)倍,行列式不变
- \[\begin{aligned}\begin{vmatrix} a & b \\ c-la & d-lb \end{vmatrix} &\overset{性质3}{=} \begin{vmatrix} a & b \\ c & d \end{vmatrix} + \begin{vmatrix} a & b \\ -la & -lb \end{vmatrix}\\ &\overset{性质3}{=} \begin{vmatrix} a & b \\ c & d \end{vmatrix} - l \begin{vmatrix} a & b \\ a & b \end{vmatrix} \\ &\overset{性质4}{=} \begin{vmatrix} a & b \\ c & d \end{vmatrix} - 0 \end{aligned} \]
- 若有一行为0,则\(\det A = 0\).
- 上三角矩阵\(u\)
- \[\det u = \begin{vmatrix} d_1 & ... & ... \\ 0 & \ddots & ... \\ 0 & 0 & d_n\end{vmatrix}=d_1 \cdot d_2\cdot \cdots d_n\]
- 当且仅当\(A\)是奇异(singular)的,行列式为0.
- 求行列式方法,先求上三角,再求对角,(和消元法一样)
- \(\det AB = (\det A)(\det B)\)
- \(\det A^{-1} = \frac{1}{\det A}\)
- \(\det A^2 = (\det A)^2\)
- \(\det 2A = 2^n \det A\)
- \(\det A^T = \det A\)
Lecture 19 Determinant Formulas and Cofactors
介绍求\(\det A\)的公式,代数余子式(Cofactor formula),Tridiagonal matrices(除三条对角线上,其它为0)。
利用行列式的基本性质1-3,可以将原行列式化为各行各列仅有一个元素的方阵的行列式之和。
Big Formula:
- \[\det A = \sum_{n!} \pm a_{1\alpha}a_{2\beta}a_{3\gamma}\cdots a_{n\omega} \],其中\((\alpha, \beta, \gamma, \dots,\omega)\)是\((1,\dots,n)\)的一个排列,正负号待定。
代数余子式(cofactors):
- 作用是把n阶行列式化简为n-1阶行列式。
- cofactor of \(a_{ij}=C_{ij}=\pm\)
把第\(i\)行和第\(j\)列去掉的\(n-1\)阶矩阵,
- \(i+j\)为偶,符号为正
- \(i+j\)为奇,符号为负
- \(\det A = a_{11}C_{11} + a_{12}C_{12} + \cdots + a_{1n}C_{1n}\)
Lecture 20 Cramer's Rule, Inverse Matrix, and Volume
关于行列式的最后一课,行列式的应用。
- 逆矩阵\(A^{-1} = \frac{1}{\det A}
C^T\)
- \(C\)是由代数余子式组成的矩阵,\(C^T\)一般称作伴随矩阵
- 克莱姆法则 (Carmer's Rule)
- \(x=A^{-1}=\frac{1}{\det A}C^T b\)
- \(x_1=\frac{\det B_1}{\det
A},x_2=\frac{\det B_2}{\det A},\dots\)
- \(B_i\)是将\(A\)中的第\(i\)列用\(b\)替代而得到的矩阵。
- 克莱姆法则一般不用来解方程,计算太复杂,Matlab中用消元法解方程。
- 行列式的应用
- 行列式的绝对值等于一个箱子的体积,正负号表示左手系还是右手系。
- 如果三角形的顶点不在原点,三个顶点坐标为\((x_1,y_1),(x_2,y_2),(x_3,y_3)\),面积为:
- \[\begin{vmatrix} x_1 & y_1 & 1 \\ x_2 &y_2 &1 \\ x_3 &y_3 & 1 \end{vmatrix}\]
- 具体推导过程,对上面的矩阵消元,想当于使三角形回到原点
Lecture 21 Eigenvalues and Eigenvectors
方阵特征值和特征向量。
- 特征向量
- \(Ax\)平行于\(x\)的特征向量
- \(Ax=\lambda x\)
- 如果\(A\)是奇异的(可以把非零向量变成0),\(\lambda=0\)是特征值。
- \(Ax\)平行于\(x\)的特征向量
- 先看投影矩阵\(P\)
- 任何平面上的向量就是特征向量,\(\lambda=1\),因为\(Px=x\)
- 任何垂直于平面的向量,\(\lambda =0\),因为\(Px=0\)
- 性质
- 特征值的和是矩阵\(A\)的对角线元素之和(\(a_{11}+a_{22}+\dots+a_{nn}\))
- 如何求解特征值
- 重写为\((A-\lambda I)x=0\),\(\lambda\)未知,\(x\)未知
- 除了零向量,要有非零\(x\)的话,\(A-\lambda I\)必须是奇异的 \(\Longrightarrow\) \(\det(A-\lambda I)=0\)
- 称为“特征方程(characteristic equation)”or 特征值方程“eigenvalue equation”
- \(\lambda\)值可能重复
- 重写为\((A-\lambda I)x=0\),\(\lambda\)未知,\(x\)未知
- if \(Ax=\lambda x\), then \((A+3I)x=Ax+3x=\lambda x+ 3x = (\lambda +
3)x\)
- 特征值加3,特征向量不变
- 旋转矩阵会有复数解
- 反对称矩阵会出现复数解
Lecture 22 Diagonalizing a matrix and Powers of A
特征值的第二讲。
- 对角化一个矩阵:\(S^{-1}AS=\Lambda\),
- \(S\)由\(A\)的特征向量组成
- 可逆\(\Longrightarrow\)\(n\)个线性无关的特征向量
- 假设\(A\)有\(n\)个线性无关的向量,把它们作为\(S\)的列向量可得:
- \[\begin{aligned} AS &= A[x_1 \quad x_2 \dots x_n]\\ &=[\lambda_1 x_1\quad \dots \lambda_n x_n ] \\ &=[x_1\dots x_n] \begin{bmatrix} \lambda_1 \dots 0 \\ 0 \dots \lambda_n \end{bmatrix} \\ &=S\Lambda \end{aligned}\]
- \(\Lambda\)是对角矩阵:特征值矩阵
- 特征值和特征向量提供了理解矩阵幂的一种好方法
- 假设\(Ax=\lambda x\),有\(A^2x=\lambda Ax=\lambda^2x\)
- \(A^2=S\Lambda S^{-1}S\Lambda S^{-1}=S\Lambda^2S^{-1}\)
- \(A^k=S\Lambda^kS^{-1}\)
- 定理
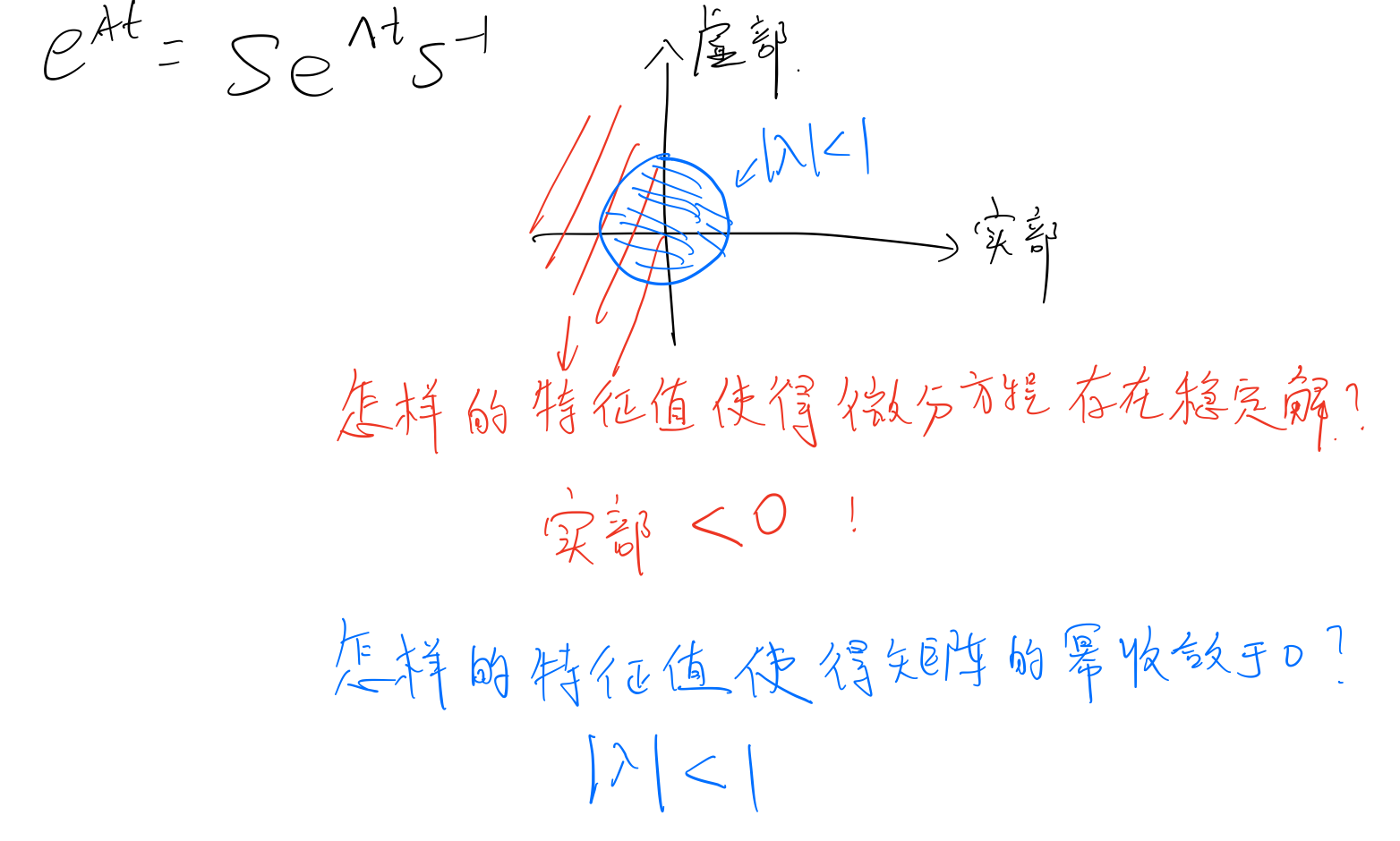
- 如果所有\(|\lambda_i|<1\),那么当\(k\rightarrow \infty\)时,\(A^k\rightarrow 0\)
- 以上这些推导的前提条件是\(n\)个线性无关的特征向量
- 哪些矩阵可对角化呢?
- 如果\(A\)矩阵的所有特征值\(\lambda\)是不同的(没有重根),那么\(A\)肯定有\(n\)个线性无关的特征向量。
- 充分但不必要
- 如果\(A\)的特征值有重复,A可能有,也可能没有 \(n\)个线性无关的特征向量。
- 如果\(A\)矩阵的所有特征值\(\lambda\)是不同的(没有重根),那么\(A\)肯定有\(n\)个线性无关的特征向量。
- \(S\)由\(A\)的特征向量组成
- Powers of A
- \(\mu_{k+1}=A\mu_k\)
- 一阶差分方程\(\mu_{k+1}=A\mu_k\),给定起始值\(\mu_0\)。求解:
- 把\(\mu_0\)写成特征向量的线性组合后再处理
- \(\mu_0=c_1x_1 + c_2x_2 + \dots + c_n x_n\)
- \(\begin{aligned} A^{100}\mu_0 &= c_1\lambda_1^{100}x_1 + c_2\lambda_2^{100}x_2 + \dots + c_n\lambda_n^{100}x_n \\ &=S \Lambda^{100} c \end{aligned}\)
- 斐波那契数列例子
- \(0,1,1,2,3,4,8,13,\dots,F_{100},\dots\)
- 不禁要问
- 这个数列的“增长速度如何”?
- 增长速度由特征值决定
- 这个数列的“增长速度如何”?
- \(F_{k+2}=F_{k+1}+F_k\),二阶差分方程
- 写成一阶:\[\mu_k = \begin{bmatrix} F_{k+1} \\ F_k \end{bmatrix}\]
- 方程组为:
- \[\begin{cases} F_{k+2} = F_{k+1} + F_k \\ F_{k+1} = F_{k+1} \end{cases}\]
- 可得
- \[\begin{aligned} \mu_{k+1} &= \begin{bmatrix} 1 & 1 \\ 1 & 0\end{bmatrix} \mu_k \\ &= \begin{bmatrix} 1 & 1 \\ 1 & 0\end{bmatrix} \begin{bmatrix} F_{k+1} \\ F_k\end{bmatrix} \end{aligned}\]
- 系数矩阵是对称阵,可知
- 特征值是实数
- 特征向量一定正交
- 求系数矩阵的特征值和特征向量
- \(\det(A-\lambda I)=0\Longrightarrow \lambda_1=\frac{1+\sqrt{5}}{2},\lambda_2=\frac{1-\sqrt{5}}{2}\)
- 特征向量:\[x_1=\begin{bmatrix}\lambda_1 \\ 1 \end{bmatrix}, x_2=\begin{bmatrix}\lambda_2 \\ 1 \end{bmatrix}\]
- 然后把\[\mu_0 = \begin{bmatrix}F_1 \\ F_0
\end{bmatrix}=c_1x_1 + c_2x_2\]
- \(c_1 = \frac{1}{\sqrt{5}},c_2=-\frac{1}{\sqrt{5}}\)
- 特征值决定增长的趋势,发散至无穷还是收敛于0
- 把\(\mu_0\)写成特征向量的线性组合后再处理
Lecture 23 Differential Equations and exp(At)
微分方程\(\frac{du}{dt}=Au\)和矩阵的指数\(e^{At}\)。
- 微分方程
- 例子
- \(u(0)=[1\quad0]^T\)
- \(\frac{du_1}{dt}=-u_1 + 2u_2\)
- \(\frac{du_2}{dt}=u_1-2u_2\)
- 系数矩阵\(A=\begin{bmatrix} -1 & 2 \\
1 & -2 \end{bmatrix}\)
- 奇异的
- \(\lambda=0,-3\)
- \(x_1=\begin{bmatrix}2 \\ 1 \end{bmatrix},x_2=\begin{bmatrix}1 \\ -1 \end{bmatrix}\)
- 解的形式是$u_t=c_1e^{_1t}x_1 + c_2e^{_2t}x_2 $
- 首先根据\(u_0\)确定\(c_1=\frac{1}{3},c_2=\frac{1}{3}\)
- 然后得到\(u(t)=\frac{1}{3}\begin{bmatrix}2 \\ 1\end{bmatrix} + \frac{1}{3}e^{-3t}\begin{bmatrix} 1 \\ -1\end{bmatrix}\)
- 可以看出稳态是\(u(\infty)=\begin{bmatrix} 2 \\ 1 \end{bmatrix}\)
- 什么情况下才有稳态?
- 稳定性 stability,需要\(e^{\lambda t}\rightarrow 0\),即\(Re \lambda<0\) (\(Re\lambda\)表示\(\lambda\)的实数部分)
- steady state需要\(\lambda_1=0,\)其它\(Re\lambda<0\)
- 无法收钱,if 任一\(Re\lambda > 0\)
- \(2\times 2\)矩阵的有稳态的条件是
- trace \(\lambda_1 + \lambda_2<0\)
- \(\det=\lambda_1 \cdot \lambda_2 > 0\)
- 回到原来的方程组\(\frac{du}{dt}=Au\)
- 矩阵\(A\)表明\(u_1,u_2\)耦合,关键是特征向量如何解耦。
- 设\(u = Sv\),\(S\)由特征向量组成,
- \(S\frac{dv}{dt}=ASv\Longrightarrow
\frac{dv}{dt}=S^{-1}ASv=\Lambda v\)
- 关键在于以特征向量为基,将\(u\)表示为\(Sv\)
- \(\Longrightarrow v(t)=e^{\Lambda t}v(0)\)
- \(u(t)=Se^{\Lambda t} S^{-1}u(0)=e^{At}u(0)\)
- 矩阵指数(Matrix exponentials)
- \(e^{At}=I+At+\frac{(At)^2}{2}+\frac{(At)^3}{6}+\dots+\frac{(At)^n}{n!}+\dots\)
- 类似于\(e^x=\sum_{0}^{\infty}\frac{x^n}{n!}\)
- \((I-At)^{-1}=I+At+(At)^2+(At)^3+\dots\)
- 要求\(At\)的特征值都小于1
- 类似于\(\frac{1}{1-x}=\sum_{0}^{\infty} x^n\)
- 证明\(e^{At}\)等于\(Se^{\Lambda t}S^{-1}\)
- \(\begin{aligned} e^{At}&=I+At+\frac{(At)^2}{2}+\dots+\frac{(At)^n}{n!}+\dots \\ &=I+S\Lambda S^{-1}t+ \frac{S\Lambda^2 S^{-1}t^2}{2} + \dots \\ &=SS^{-1} + S\Lambda S^{-1}t+\frac{S\Lambda^2 S^{-1}t^2}{2}+\dots \\ &= Se^{\Lambda t}S^{-1} \end{aligned}\)
- \[e^{\Lambda t}= \begin{bmatrix}
e^{\lambda_1 t} & \dots & 0 \\ \vdots & \ddots & \vdots
\\ 0 & \dots & e^{\lambda_n t} \end{bmatrix}\]
- 如果所有特征值的实部为负(\(Re\lambda_i < 0\)),对角线的指数收敛于0。
- \(e^{At}=I+At+\frac{(At)^2}{2}+\frac{(At)^3}{6}+\dots+\frac{(At)^n}{n!}+\dots\)
- 只有1个方程:\(y^{\prime\prime}+by^{\prime}+ky=0\),二阶微分方程
- 把1个二阶微分方程化为一阶方程组
- 令\(u=\begin{bmatrix}y^{\prime} \\ y \end{bmatrix}\),
- \[u^{\prime}=\begin{bmatrix}y^{\prime\prime} \\ y^{\prime} \end{bmatrix}=\begin{bmatrix}-b & -k \\ 1 & 0\end{bmatrix}\begin{bmatrix}y^{\prime} \\ y\end{bmatrix}\]
- 同理五阶的微分方程也可以化为一阶方程组,对应矩阵为:
- \[\begin{bmatrix}\dots & \dots & \dots & \dots & \dots \\ 1 & & & & \\ & 1 & & & \\ & & 1 & & \\ & & & 1 & 0 \end{bmatrix}\]
- 例子
Lecture 24 Markov Matrices, Fourier Series
主要内容包括:马尔可夫矩阵和它的稳态,Fourier Series Projections,特征值的应用。
- Markov Matrices (马尔可夫矩阵)
- \[\begin{bmatrix} .1 & .01 &.3 \\ .2 &.99 &.3 \\ .7 &0 &.4 \end{bmatrix}\]
- 满足以下条件:
- 所有元素\(\ge 0\)
- 每一列加起来为1 \(\Longrightarrow \lambda=1\)是特征值
- 它的幂也是马尔可夫矩阵
- 稳态和特征值1及其特征向量关联在一起
- 稳态的关键在于
- \(\lambda=1\)是特征值
- 所有其它特征值\(|\lambda_i|<1\)
- \(\mu_k=A^k\mu_0=c_1\lambda_1^kx_1+c_2\lambda_2^k+\dots\), 当满足上面两个条件时,这个式子趋近于\(c_1x_1\)
- 证明:每一列的和为1,那么1是特征值
- 思路:如果\(A-1\cdot I\)是奇异的,那么1是特征值
- 由于\(A-1 \cdot I\)每一列和为0,相当于要证:每一列和为0时,矩阵是奇异的
- 方法
- 求行列式\(\rightarrow\) 太复杂
- 奇异的,意味着
- 列向量线性相关
- 行向量线性相关(正好有\(1\cdot row_1 + 1 * row_2 + ...=0\))
- 以3阶矩阵为例,说明\((1,1,1)\)在\(n(A^T)\)(转置的零空间,左零空间)中
- then,\(x_1\)(\(\lambda=1\)对应的特征向量)在\(n(A-I)\)中
- \(A\)和\(A^T\)的特征值是一样的
- \(\det(A-\lambda I)=0\)
- 利用\(\det(A)=\det(A^T)\)
- $(A-I)=0 $
- $(A-I)^T =0 $
- \(\det(A^T-\lambda I)=0\)
- 应用,马尔科夫矩阵,
- 两个地方的人口迁移问题
- 傅立叶级数
- 回归带有标准正交基的投影问题
- 标准正交基:\(q_1,\dots,q_n\)
- \(v=x_1q_1+x_2q_2+\dots+x_nq_n\)
- 基向量的系数很容易求出:\(q_1^Tv=x_1q_1^Tq_1+0+\dots+0=x_1\cdot 1\)
- Fourier series可以把任何周期函数或周期信号分解成一个(可能由无穷个元素组成的)简单振荡函数的集合(PERIODIC Function,周期函数)
- 已知函数\(f(x)=a_0\cdot 1 +a_1\cos
x+b_1\sin x+a_2\cos 2x + b_2\sin 2x + \dots\)
- 无穷维,关键性质是正交
- “正交”
- 向量的正交是\(y^Tx=0\)
- 函数的正交(对于函数\(f,g\))是\(f^Tg=\int_0^{2\pi}f(x)g(x)=0\)
- 怎么计算\(a_1\)
- \(\int_{0}^{2\pi}f(x)\cos xdx=0 + a_1\int_{0}^{2\pi}(\cos x)^2dx + 0 + \dots\)
- 回归带有标准正交基的投影问题
Lecture 25 Review for Quiz 2
习题课,包括以下内容:
- 投影,最小二乘,Gram-Schmidt正交化
- 行列式的性质,代数余子式
- 特征值,对角化,矩阵的幂
Lecture 26 Symmetric Matrices and Positive Definiteness
本讲是关于对称矩阵的知识,\(A=A^T\),意味着:特征值是实数,特征向量互相垂直
- 根据矩阵的对角化:\(A=S\Lambda
S^{-1}\),\(S\)由特征向量构成,\(\Lambda\)由特征值构成
- 对称矩阵\(A=Q\Lambda Q^{-1}=Q\Lambda Q^{T}\),\(Q\)是标准正交向量
- 为什么对称阵的特征值是实数?
- 先回归共轭:\(\overline{a+ib}=a-ib\)
- \(Ax=\lambda x\)
(1.)总可以得到\(\bar{A}\bar{x}=\bar{\lambda}\bar{x}\)
(2.)
- \(A\)为实矩阵时
- \(\bar{A}=A\)
- 转置2. 可得\(\bar{x}A^T = \bar{x}^T \bar{\lambda}\)
- 由于对称,\(\bar{x}A = \bar{x}^T\bar{\lambda}\) (3.)
- 1.左乘\(\bar{x}^T\),\(\bar{x}^TAx = \lambda \bar{x}^Tx\)
- 3.右乘\(x\),,\(\bar{x}^TAx = \bar{x}^T\bar{\lambda}x\)
- 由上面两个式子可得,\(\lambda \bar{x}^Tx=\bar{\lambda}\bar{x}^Tx\Longrightarrow \lambda =\bar{\lambda}\), 所以\(\lambda\)是实数
- A为复矩阵时
- 转置2.可得,\(\bar{x}^T\bar{A}^T = \bar{x}^T \bar{\lambda}\) (4.)
- 1.左乘\(\bar{x}^T\),\(\bar{x}^TAx = \lambda \bar{x}^Tx\)
- 4.右乘\(x\),,\(\bar{x}^T\bar{A}^Tx = \bar{x}^T\bar{\lambda}x\)
- 所以,当且仅当\(A=\bar{A}^T\)时,才有\(\lambda\)是实数
- 定义新的符号:\(A^H \triangleq \bar{A}^T\),表示共轭转置
- \(A\)为实矩阵时
- 对称阵可以分解为\(A=Q\Lambda
Q^T=\lambda_1q_1q_1^T+\lambda_2q_2q_2^T+\dots\)
- \(q_iq_i^T\)是投影矩阵
- 每个对称阵都是一些互相垂直的投影矩阵的组合,(理解谱定理的另一种方法)
- 上面知道了对称阵的特征值是实数了,下面分析一下特征值的正负
- 对于对称阵来说,主元的符号与特征值的符号相同
- 正主元的个数等于正特征值的个数
- 什么是正定矩阵(positive definite
matrix)(对称的)
- 所有的特征值是正的
- 所有的主元是正的
- 所有的子行列式是正的(从左上角开始,\(1\times1,2\times 2...\), 即顺序主子式都大于0)
- 微分方程需要根据特征值的正负判断稳定性
- 对于对称阵来说,主元的符号与特征值的符号相同